EASEEbot
In the United States, buildings account for 28% of total primary energy usage and 40% of greenhouse gas (GHG) emissions. Studies by the EPA and other agencies estimate that energy costs could be reduced by up to 20% by better air-sealing the building envelope (i.e., walls, windows, roof). While energy audits and envelope inspections are necessary to identify these air leaks and maintain a building’s energy efficiency, such undertakings can be expensive, time-consuming, and physically dangerous to inspectors.
Towards enhancing inspectors capabilities to assess building envelope conditions, we propose a robotic envelope assessment system for energy efficiency…or EASEEbot for short. The EASEEbot system has two use cases for human-robot collaboration between a building inspector and sensor-equipped robot: FLY and CLIMB.
FLY: The drone can navigate around the building exterior with a thermal infrared camera, simultaneously capturing a 3D point cloud of the building’s geometry and a heat map identifying areas of building envelope leaks. It can also navigate inside physically tight spaces, like roof attics, and perform similar camera surveys.
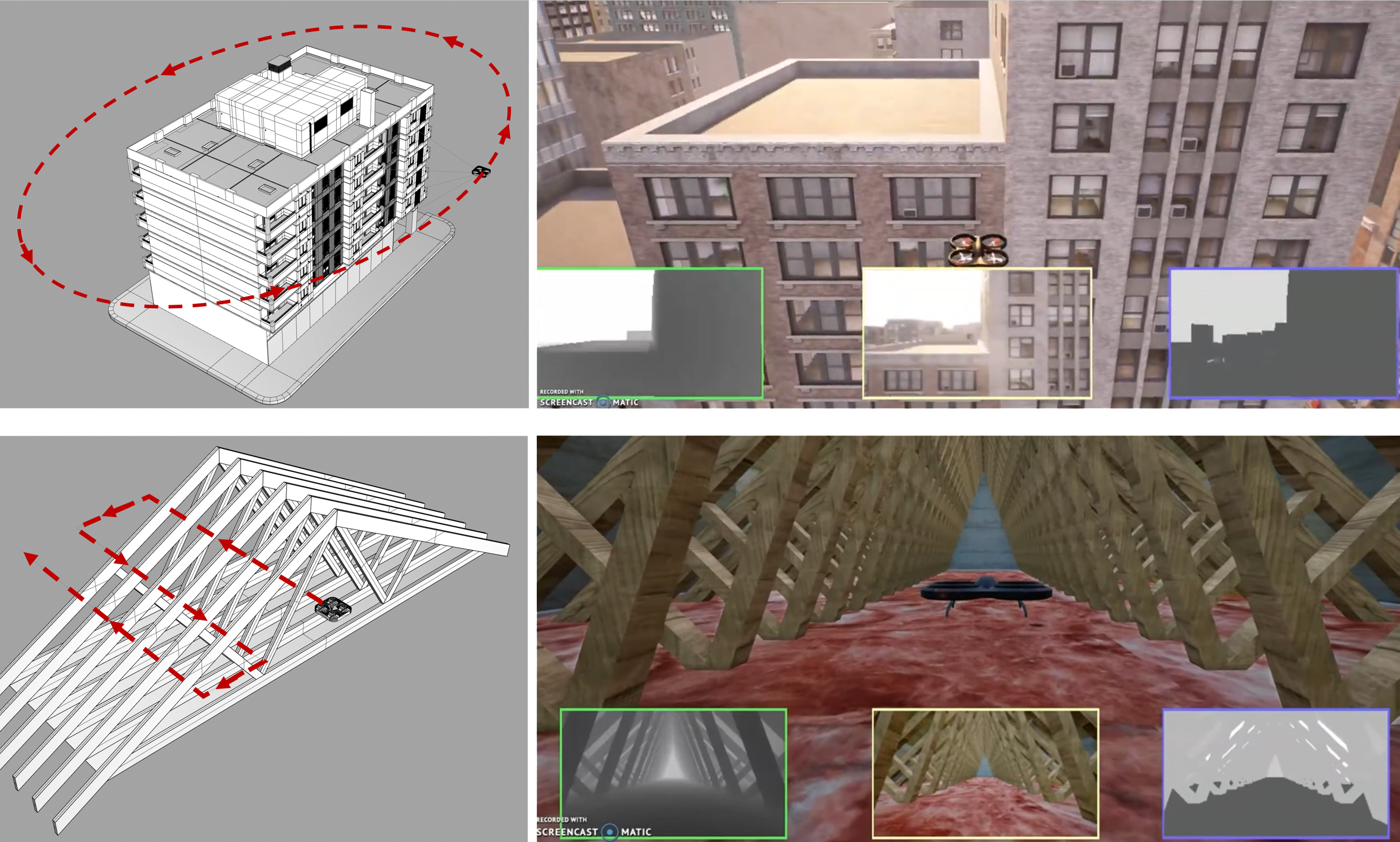
This can save inspectors significant time and physical labor, especially in both urban high-rises and low-rise residential buildings.
CLIMB: The drone can also be tethered and move along the vertical face of the building walls to scan the building envelope’s internal layers for moisture using a ground-penetrating radar (GPR) sensor (below right).

This can save inspectors the trouble of opening up sections of the wall for moisture damage evaluation, since the sensors can assess moisture conditions from the outside (i.e., nondestructive testing). This can also save property owners the setup costs for installing otherwise required scaffolds around the building envelope.
We proposed the EASEEbot system to the US Department of Energy in its Envelope Retrofit Opportunities for Building Optimization Technologies (E-ROBOT) Competition and ended up as one of ten finalists.
Since the E-ROBOT competition, the team has applied for a patent and spun off as a building inspection startup.
Team
Concept Design and Use Cases: Bilal Sher, Daniel Lu, Beyza Kiper, Semiha Ergan
Robot Hardware: Bilal Sher, Xuchu Xu, Chen Feng
Awards
Finalist in US Department of Energy (DOE) Envelope Retrofit Opportunities for Building Optimization Technologies (E-ROBOT) Competition Phase 1 (April 2022)
Publications
Xu, X., Lu, D., Sher, B., Kim, S., Rathod, A., Ergan, S., Feng, C. (2021). Conceptual Design of a Robotic Building Envelope Assessment System for Energy Efficiency. In: Feng, C., Linner, T., Brilakis, I. (eds) 2021 Proceedings of the 38th ISARC. https://doi.org/10.22260/ISARC2021/0088
Patents
Feng, C., Ergan, S., Sher, B., Xu, X., Chen, G., Javed, T., Madhusudhan, S., Mahesh, S., Vasudevan, A., Lu, D., Kiper, B. (2024). System and Method for Robotic Inspection”, https://patents.google.com/patent/US20240134007A1/